









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
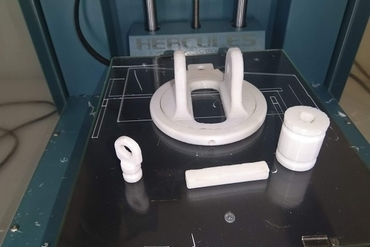
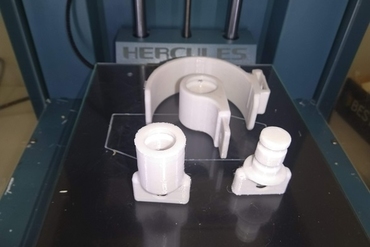
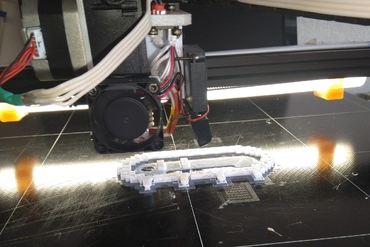
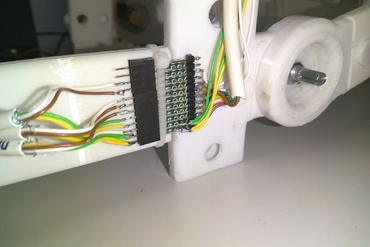
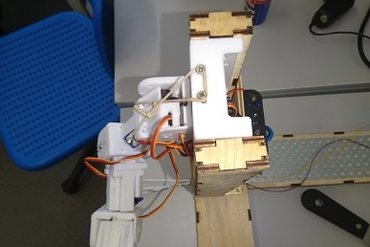
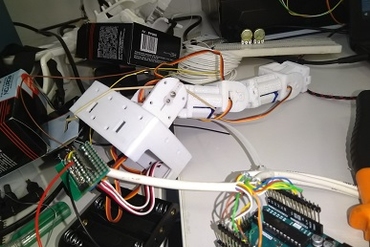
Совместно с сотрудниками областной больницы разрабатывается методика применения костюма. Проводится анализ об эффективности применения данного экзоскелета с помощью метода зеркальной терапии, а также других методах. Вносятся коррективы в конструкцию и программно-аппаратную часть костюма, достигается оптимальная скорость и плавность движений.
+7 (900) 029-50-10 ДЮТТ
+7 (904) 808-60-10 Кванториум Челябинск
+7 (3519) 33-07-37 Кванториум Магнитогорск
+7 (351) 369-08-13 Кванториум Златоуст
+7 (35163) 2-45-85 Кванториум Троицк
+7 (351) 394-33-03 Кванториум Копейск
+7 (35160) 2-25-76 Кванториум Пласт
+7 (35134) 4-22-81 IT-Куб Южноуральск
+7 951 806 3486 IT-Куб Сатка
+7 (3519) 33-08-08 IT-Куб Магнитогорск
+7 951-787-67-82 IT-Куб Кыштым
+7 (35146) 92 716 IT-Куб Снежинск
+7 9000 670 186 IT-Куб Миасс
+7 (351) 218-11-16 IT-Куб Челябинск
+7 (919) 111-20-76 IT-Куб Трехгорный
+7 (904) 808-60-10 Кванториум Челябинск
+7 (3519) 33-07-37 Кванториум Магнитогорск
+7 (351) 369-08-13 Кванториум Златоуст
+7 (35163) 2-45-85 Кванториум Троицк
+7 (351) 394-33-03 Кванториум Копейск
+7 (35160) 2-25-76 Кванториум Пласт
+7 (35134) 4-22-81 IT-Куб Южноуральск
+7 951 806 3486 IT-Куб Сатка
+7 (3519) 33-08-08 IT-Куб Магнитогорск
+7 951-787-67-82 IT-Куб Кыштым
+7 (35146) 92 716 IT-Куб Снежинск
+7 9000 670 186 IT-Куб Миасс
+7 (351) 218-11-16 IT-Куб Челябинск
+7 (919) 111-20-76 IT-Куб Трехгорный